AdapterForLaserScans
AdapterForLaserScans captures point data from E57 and stores it in a file (*.upvc). This file is used as input for CAXperts UniversalPlantViewer to generate the UniversalPlantViewer.
Supported Formats
Laserscans:
- E57 (Must include scanning position - unified point clouds are not supported)
Panoramas:
TruViews
LFM Panoramas
Meshes:
- OBJ (Optionaly with MTL and texture files)
Overview
This chapter provides a quick overview of the AdapterForLaserScans’s main functions. For detailed information please refer to the specific chapters. Or Click Here!

Operating principal
The AdapterForLaserScans converts the provided Point Cloud from the Laserscan-file into a tesselated Mesh.
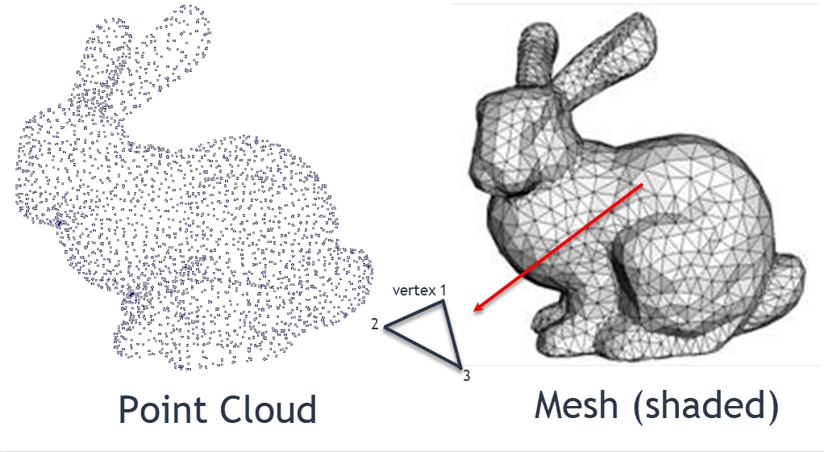
The Programm eliminates doubled Points and rebalances the cloud density.
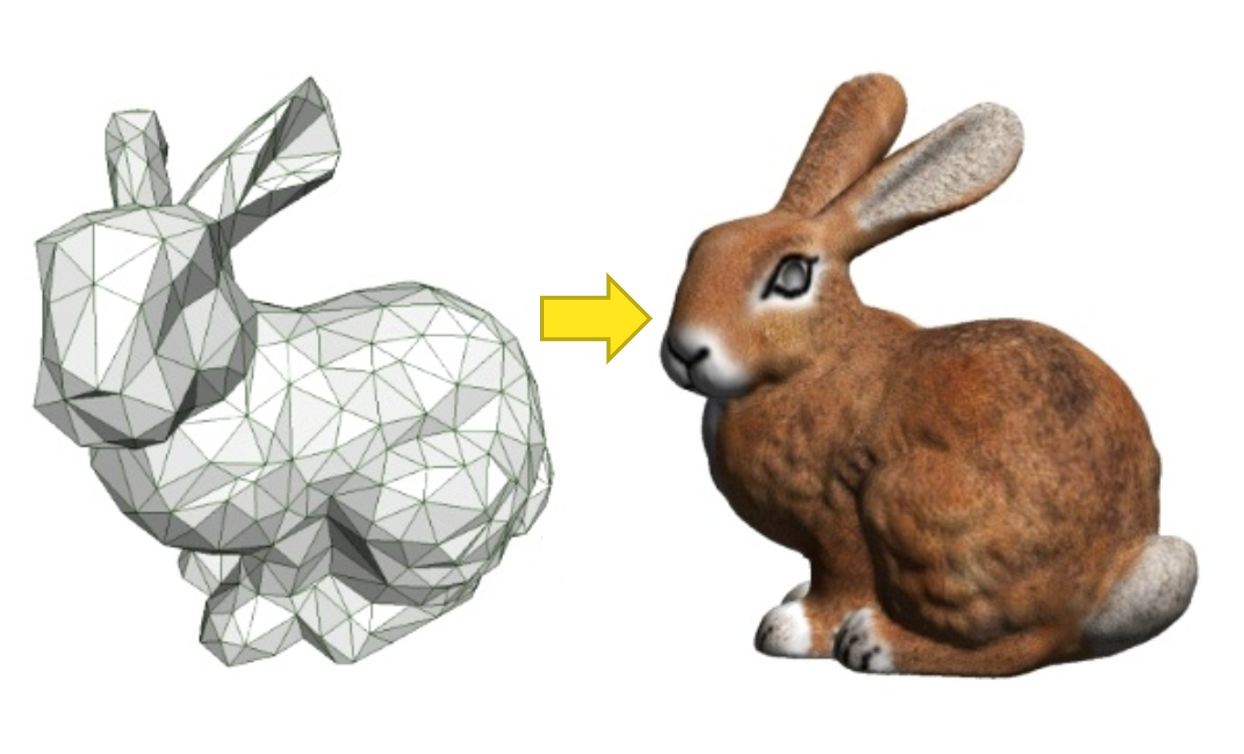
The AdapterForLaserScans adds the 3D-textures to the Laserscans as shown below:
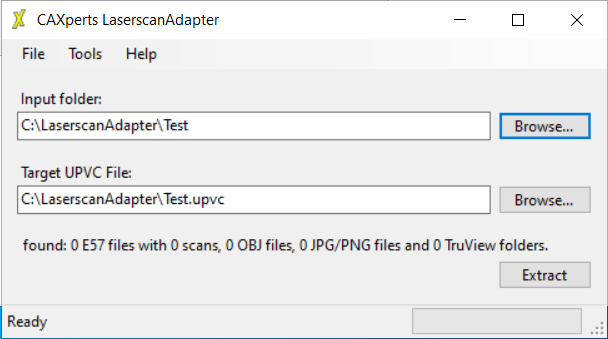
Interface
Select the inpt folder for the AdapterForLaserScans and the corresponding Target folder.
Settings
Meshing options
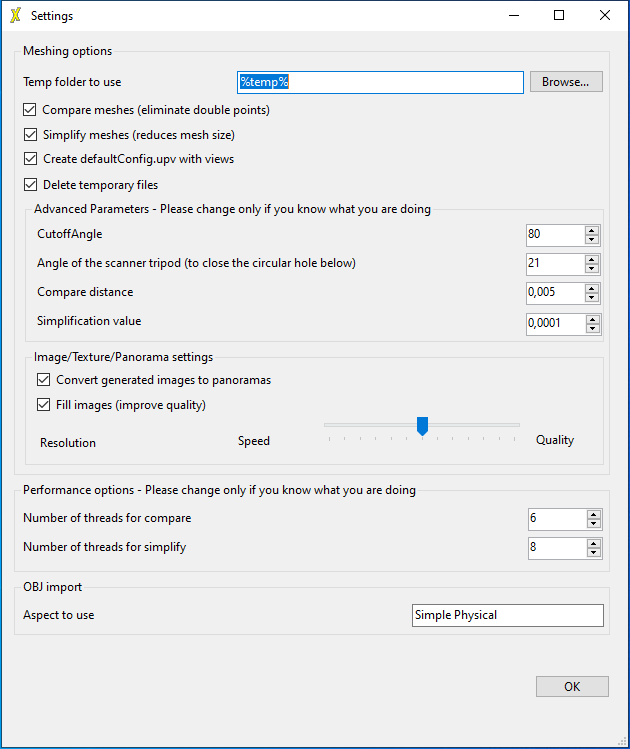
%temp% option
Due to the size of Laserscan files, the User has the option to accurately select the data-path. Select “Browse” to redirect to the preferred folder location.
It is to be expected, that the Laserscan file size affects the loading time of the AdapterForLaserScans. The overlapping sections of any scan will be compared.
Configurations
Compare meshes (eliminate double points)
This Setting enables the AdapterForLaserScans to eliminate double points and to rebalance the point cloud composition. The generated mesh will overall be uniform, without dense point clusters.
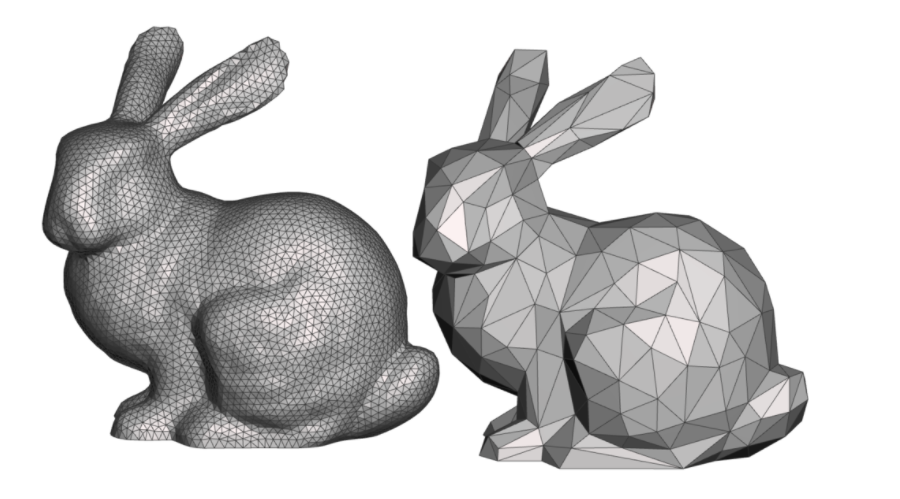
Simplify meshes (reduce mesh size)
Enables the programm to automaticly reduce the generated mesh size. The quality of the 3D-Object will be reduced and the overall size of triangles are extended. This simplifies the Loading- and Rendering-Process in the 3D-Enviroment.
Create defaultConfig.upv with views
Sets the default Configuration to save the Laserscan data (.upv-files) to include views.
Delete temporary files
With this option enabled, temporary files are regulary deleted.
| Advanced Parameters | |
|---|---|
| CutoffAngle: | Triangles of a mesh are seen from the Scanner at different angles. If the angle is greater than set value, they will be deleted. The recommended value is 80 Degrees. |
| Angle of the scanner tripod: | Regulates the blindspot of the tripod. The angle of the tripod feet are entered as an angle value. This only applies to the downward angle. |
| Compare distance: | Several meshes can be overlapping. A smaler value enables a more detailed analysis of the to be cut away triangles. The lower the value, the longer the comparison takes. The unit of measurement is milimeters (mm). |
| Simplification value: | Higher values increase the simplification process e.g. if the value is set to 0,1 there will be more simplification as with the value of 0,0001. This setting only applies to the size of texures and/or panoramas. |
| Image/Texture/Panorama settings | |
|---|---|
| Convert generated images to panoramas: | The viewing point of a panorama will be selectable in the laserscan itself. By disabling this function, panoramas will no longer be viewable through the red 360 Degrees dots. |
| Fill images: | If enabled the quality of generated images is improved. This does not apply to TruViews and Panoramas. |
| Slider: | Sets the pixel resolution of the 360° image. From the most left side (4000x2000) to the most right side (16000x8000). |
| Performance options | |
|---|---|
| Number of threads for compare: | It is advised to utelize to suggested settings. |
| Number of threads for simplify: | Several meshes are processed at the same time. This option limits the number of meshes that are processed simultaneously. |
| OBJ import | |
|---|---|
| Aspect to use: | Obj-files can be imported and in the Settings under Aspects, obj-files can be deactivated seperately. |